- Vector Index: Optimized for searching high-dimensional data (like images, audio, or text embeddings) by efficiently finding the most similar vectors
- Full-Text Search Index: Enables fast keyword-based searches by indexing words and phrases
- Scalar Index: Accelerates filtering and sorting of structured numeric or categorical data (e.g., timestamps, prices)
Supported Index Types
LanceDB provides a comprehensive suite of indexing strategies for different data types and use cases:TypeScript currently doesn’t support
IvfSq (IVF with Scalar Quantization).Operational checksFor vector indexes, use the same distance metric when creating the index and searching it. After appends or other writes, use
optimize() to fold new rows into existing indexes, then check index_stats(...) or wait_for_index(...) if you need to confirm the index has caught up. wait_for_index(...) waits until the named indexes exist and report num_unindexed_rows == 0; it can time out if writes keep adding unindexed rows.By default, automatic vector indexing creates IVF_PQ, and scalar index creation defaults to
BTree unless you pass another scalar index config. BTree and Bitmap indexes target scalar
columns, not list columns; use LabelList for list containment filters.Quantization Types
Vector indexes can use different quantization methods to compress vectors and improve search performance:Understanding the IVF-PQ Index
An ANN (Approximate Nearest Neighbors) index is a data structure that represents data in a way that makes it more efficient to search and retrieve. Using an ANN index is faster, but less accurate than kNN or brute force search because, in essence, the index is a lossy representation of the data. A key distinguishing feature of LanceDB is it uses a disk-based index: IVF-PQ, which is a variant of the Inverted File Index (IVF) that uses Product Quantization (PQ) to compress the embeddings. LanceDB is fundamentally different from other vector databases in that it is built on top of Lance, an open-source columnar data format designed for performant ML workloads and fast random access. Due to the design of Lance, LanceDB’s indexing philosophy adopts a primarily disk-based indexing philosophy.IVF-PQ
IVF-PQ is a composite index that combines inverted file index (IVF) and product quantization (PQ). The implementation in LanceDB provides several parameters to fine-tune the index’s size, query throughput, latency and recall, which are described later in this section.Product Quantization
Quantization is a compression technique used to reduce the dimensionality of an embedding to speed up search. Product quantization (PQ) works by dividing a large, high-dimensional vector of size into equally sized subvectors. Each subvector is assigned a “reproduction value” that maps to the nearest centroid of points for that subvector. The reproduction values are then assigned to a codebook using unique IDs, which can be used to reconstruct the original vector.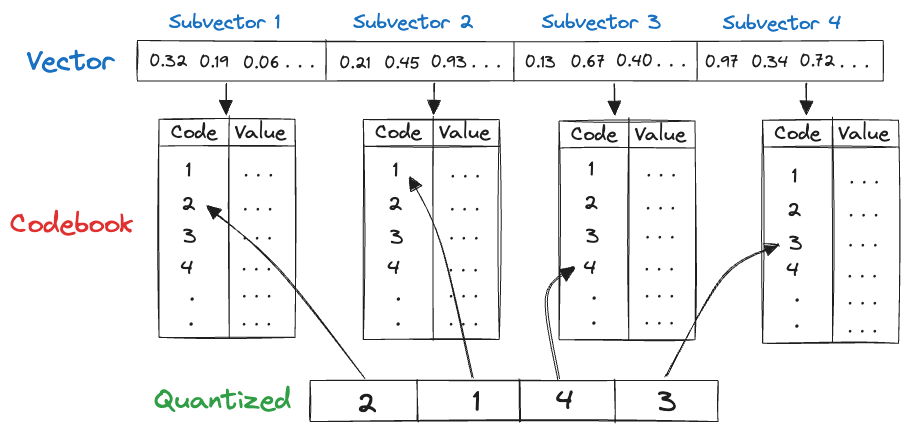
Original:
128 × 32 = 4096 bits
Quantized: 4 × 8 = 32 bitsQuantization results in a 128x reduction in memory requirements for each vector in the index, which is substantial.Inverted File Index (IVF) Implementation
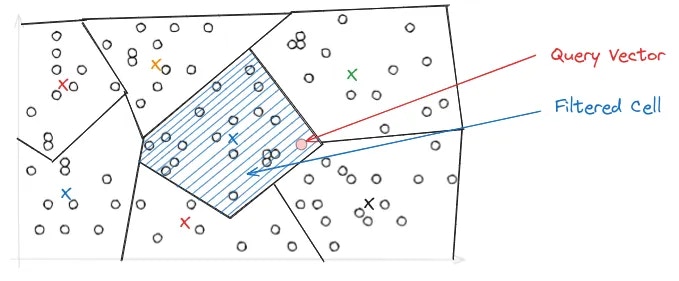
While PQ helps with reducing the size of the index, IVF primarily addresses search performance. The primary purpose of an inverted file index is to facilitate rapid and effective nearest neighbor search by narrowing down the search space. In IVF, the PQ vector space is divided into Voronoi cells, which are essentially partitions that consist of all the points in the space that are within a threshold distance of the given region’s seed point. These seed points are initialized by running K-means over the stored vectors. The centroids of K-means turn into the seed points which then each define a region. These regions are then are used to create an inverted index that correlates each centroid with a list of vectors in the space, allowing a search to be restricted to just a subset of vectors in the index.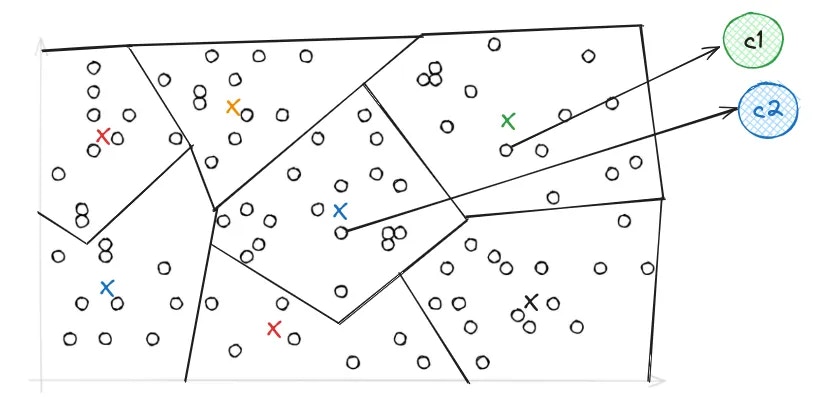
nprobe parameter, which controls the number of Voronoi cells to search during a query. The higher the nprobe, the more accurate the results, but the slower the query.
HNSW Index Implementation
Approximate Nearest Neighbor (ANN) search is a method for finding data points near a given point in a dataset, though not always the exact nearest one. HNSW is one of the most accurate and fastest Approximate Nearest Neighbour search algorithms, It’s beneficial in high-dimensional spaces where finding the same nearest neighbor would be too slow and costly.Types of ANN Search Algorithms
Approximate Nearest Neighbor (ANN) search is a method for finding data points near a given point in a dataset, though not always the exact nearest one. HNSW is one of the most accurate and fastest Approximate Nearest Neighbour search algorithms, It’s beneficial in high-dimensional spaces where finding the same nearest neighbor would be too slow and costly There are three main types of ANN search algorithms:- Tree-based search algorithms: Use a tree structure to organize and store data points.
- Hash-based search algorithms: Use a specialized geometric hash table to store and manage data points. These algorithms typically focus on theoretical guarantees, and don’t usually perform as well as the other approaches in practice.
- Graph-based search algorithms: Use a graph structure to store data points, which can be a bit complex.
HNSW also combines this with the ideas behind a classic 1-dimensional search data structure: the skip list.
Understanding k-Nearest Neighbor Graphs
The k-nearest neighbor graph actually predates its use for ANN search. Its construction is quite simple:- Each vector in the dataset is given an associated vertex.
- Each vertex has outgoing edges to its k nearest neighbors. That is, the k closest other vertices by Euclidean distance between the two corresponding vectors. This can be thought of as a “friend list” for the vertex.
- For some applications (including nearest-neighbor search), the incoming edges are also added.
- Given a query vector, start at some fixed “entry point” vertex (e.g. the approximate center node).
- Look at that vertex’s neighbors. If any of them are closer to the query vector than the current vertex, then move to that vertex.
- Repeat until a local optimum is found.
In fact, another data structure is not needed: This can be done “incrementally”. That is, if you start with a k-ANN graph for n-1 vertices, you can extend it to a k-ANN graph for n vertices as well by using the graph to obtain the k-ANN for the new vertex. One downside of k-NN and k-ANN graphs alone is that one must typically build them with a large value of k to get decent results, resulting in a large index.
Hierarchical Navigable Small Worlds (HNSW)
HNSW builds on k-ANN in two main ways:- Instead of getting the k-approximate nearest neighbors for a large value of k, it sparsifies the k-ANN graph using a carefully chosen “edge pruning” heuristic, allowing for the number of edges per vertex to be limited to a relatively small constant.
- The “entry point” vertex is chosen dynamically using a recursively constructed data structure on a subset of the data, similarly to a skip list.
- At the bottom-most layer, a k-ANN graph on the whole dataset is present.
- At the second layer, a k-ANN graph on a fraction of the dataset (e.g. 10%) is present.
- At the Lth layer, a k-ANN graph is present. It is over a (constant) fraction (e.g. 10%) of the vectors/vertices present in the L-1th layer.
- At the top layer (using an arbitrary vertex as an entry point), use the greedy local search routine on the k-ANN graph to get an approximate nearest neighbor at that layer.
- Using the approximate nearest neighbor found in the previous layer as an entry point, find an approximate nearest neighbor in the next layer with the same method.
- Repeat until the bottom-most layer is reached. Then use the entry point to find multiple nearest neighbors (e.g. top 10).